4. РЕЗУЛЬТАТЫ ТЕОРЕТИЧЕСКИХ ИССЛЕДОВАНИЙ ПРОЦЕССА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
4.2. Определение условий проведения теоретических исследований и обоснование границ варьируемых параметров
При проведении теоретических
исследований в качестве базовой машины была рассмотрена сваезавинчивающая
машина МЗС-219, которая была создана в Конструкторском бюро транспортного машиностроения
(г. Омск).
Время моделирования было прнинято равным
20 с. Для варьирования
исследуемых параметров в процессе исследования, было необходимо обосновать
диапазоны их изменения, основываясь на реальных технических свойствах
оборудования. Время запаздывания современной
гидроаппаратуры τгп складывается из времени запаздывания
разгрузочного клапана, динамических запаздываний золотника гидрораспределителя,
трубопроводов и гидроцилиндра. Общее время запаздывания гидропривода τгп
для современной аппаратуры находится в пределах 0,02 – 0,1 с [26].
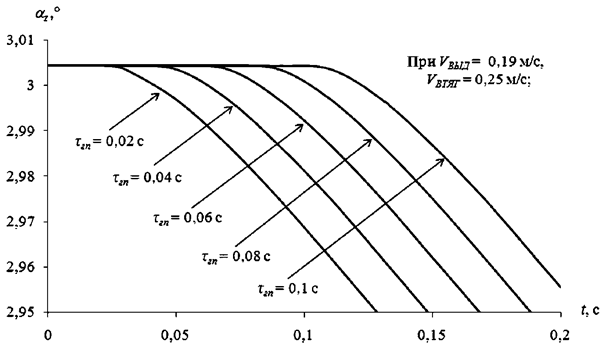
Рис. 4.1. График зависимости
изменения угла наклона платформы во времени при различных значениях постоянной
времени запаздывания гидропривода системы управления на включение
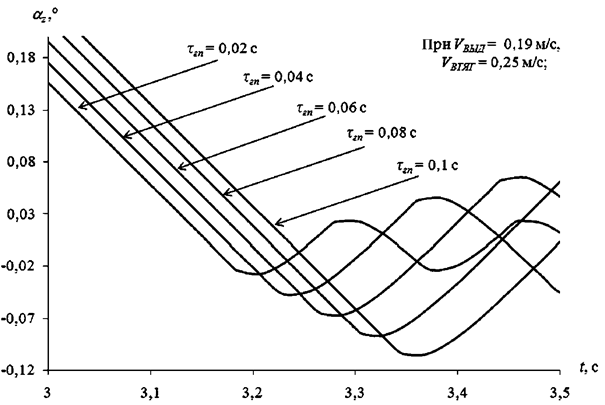
Рис. 4.2. График зависимости
изменения угла наклона платформы во времени при различных значениях постоянной
времени запаздывания гидропривода системы управления на выключение
На рис. 4.1 изображены графики зависимости изменения угла
наклона платформы во времени при различных значениях постоянной времени
запаздывания гидропривода системы управления на включение. На рис. 4.2 приводятся
графики зависимости изменения угла наклона платформы во времени при различных
значениях постоянной времени запаздывания гидропривода системы управления на
выключение. Из графиков видно, что скорость
штока устанавливается еще некоторое время после срабатывания электрогидрораспределителя,
что объясняется инерционностью гидроаппаратуры и динамическими процессами в
гидросистеме. Данный процесс присутствует во всех гидросистемах и называется
динамическим запаздыванием гидропривода. Время разгона штока при включении
гидропривода определяется постоянной времени гидроцилиндра.
Скорость изменения длины аутригера
платформы будет равна скорости перемещения штока исполнительного гидроцилиндра
аутригера.
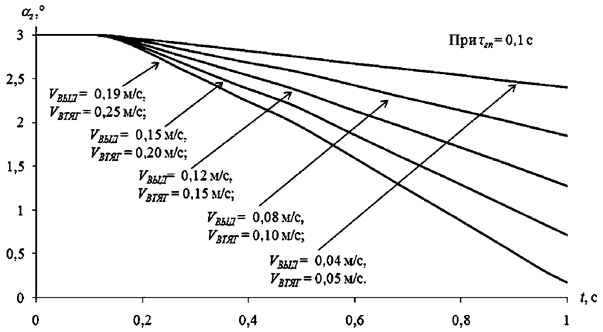
Рис. 4.3. График зависимости
изменения угла наклона платформы во времени при различных значениях скорости
перемещения штоков исполнительных гидроцилиндров аутригеров платформы
Так как площади поршневой и штоковой полостей отличаются, то
и скорости перемещения
гидроцилиндра на втягивание (штоковая полость) и выдвижение (поршневая полость)
аутригера будут различными. В связи с
различием скоростей движения обозначены: VВТЯГ – скорость
втягивания аутригера, VВЫД – скорость
выдвижения аутригера.
 . (4.1) . (4.1)
На рис. 4.3 изображены графики изменения угла наклона платформы
строительной машины от времени при различных скоростях штоков исполнительных
гидроцилиндров аутригеров. Время запаздывания гидропривода системы управления
постоянно τгп = 0,1 с.
В качестве обозначения исследуемой скорости принята скорость
втягивания аутригера VВТЯГ. В
качестве примера для данных исследований принят диапазон изменения скорости
втягивания аутригера VВТЯГ от
0,05 до 0,25 м/с. Известно,
что на возникновение автоколебаний в нелинейных системах управления влияет
величина зоны нечувствительности порогового элемента, так называемая «мертвая
зона», и чем она меньше, тем более система склонна к возникновению автоколебаний
[26].
Согласно статической характеристике порогового элемента, величину
зоны нечувствительности задает сумма порогов срабатывания на включение и
отключение порогового элемента Dα. Необходимо провести теоретические исследования устойчивости
процесса управления положением платформы строительной машины, чтобы выявить значения зоны
нечувствительности порогового элемента Dα, обеспечивающие отсутствие колебательности
в устройстве управления.
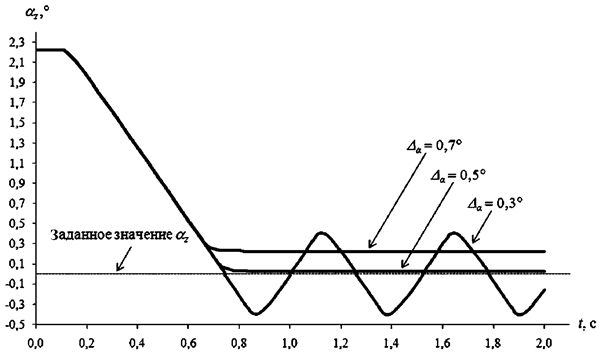
Рис. 4.4. Переходный процесс αz при различных значениях Δα
На рис. 4.4 представлены переходные процессы изменения угла
наклона платформы строительной машины αz (заданное
значение αz=0°) для трех различных значений зоны нечувствительности порогового
элемента Δα при запаздывании
гидропривода τгп=0,1 с; VВТЯГ=0,25 м/с.
Представленный график наглядно
демонстрирует влияние величины зоны нечувствительности порогового элемента Δα на колебательность
процесса управления положением платформы строительной машины. При достижении
сигналом рассогласования границ зоны нечувствительности порогового элемента
управляющий сигнал прекращается, но аутригеры платформы перемещаются еще некоторое
время из-за запаздывания гидропривода. В случае, если остаточное перемещение
аутригеров не превышает ширины данной зоны, их движение прекращается и угол
наклона платформы αz остается внутри
зоны. Если же ширина зоны Δα будет мала, то
аутригеры «проскакивают» зону нечувствительности, что приводит к необходимости
движения в обратном направлении. Данный факт приводит к появлению
автоколебаний в процессе управления положением платформы и ее неустойчивости.
Если же ширина зоны нечувствительности
слишком велика, то появляется статическая ошибка Dαz, соответственно теряется точность
процесса установки платформы в горизонтальное положение. Для настоящих исследований в качестве
примера рассматривался диапазон изменения ширины зоны нечувствительности
порогового элемента Δα от 0,05 до 0,25°.
|
