3. РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
3.3. Обоснование информационных параметров процесса управления положением платформы строительной машины
Основные параметры, необходимые для работы системы управления
положением платформы, – это углы наклона по диагональным осям платформы к
горизонту αx и αy. Эти углы задаются нормами безопасности при работе строительной машины [10,
11]. В процессе установки платформы изменяется длина гидравлических опор, что
приводит к изменению углов наклона платформы. На рис. 3.5 схематично показана
платформа строительной машины.
Цифрами 1, 2, 3, 4 показаны
гидравлические опоры платформы (аутригеры); X, X′ и Y – диагональные оси, по которым измеряются
углы наклона платформы относительно горизонта; L1 – начальная длина аутригера 3; L2 – конечная длина аутригера 3; Dαx – изменение угла наклона по
диагональной оси X. При
выдвижении штока гидроцилиндра аутригера 3 платформа меняет свое пространственное
положение (Позиция 1 → Позиция 2), это приводит к изменению
угла наклона по оси X.
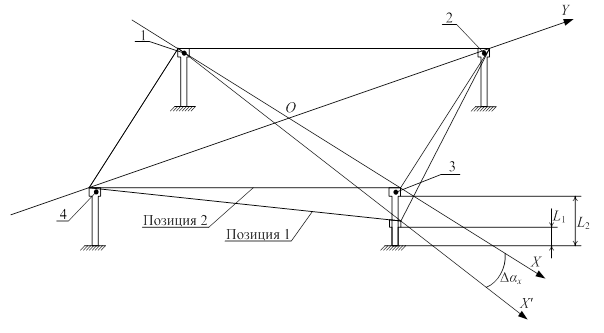
Рис. 3.5. Изменение информационного
параметра при изменении
длины аутригера
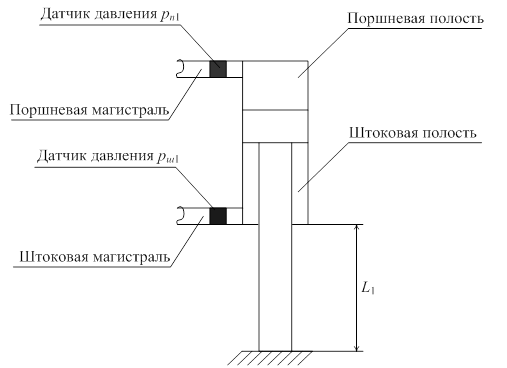
Рис. 3.6. Гидроцилиндр опоры 1
Таким образом, для обеспечения требуемого положения платформы
необходимо контролировать два информационных параметра – углы наклона
относительно горизонта по осям X и Y, т.е. αx и αy. На рис. 3.6 схематично показан
гидроцилиндр опоры 1 платформы строительной машины. L1 – длина выдвижения штока гидроцилиндра опоры; pп1 и pш1 – давления соответственно в поршневой и штоковой полостях
гидроцилиндра опоры 1.
Для правильной работы системы необходимо контролировать также
положения штоков гидроцилиндров опор 1, 2, 3, 4,
т.е. L1, L2, L3, L4 соответственно
(см. рис. 3.5). К информационным параметрам относятся давления в поршневой и
штоковой полостях гидроцилиндров опор 1, 2, 3, 4: pп1, pш1; pп2, pш2; pп3, pш3; pп4, pш4 соответственно.
|
