3. РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
3.4. Ориентация датчиков для измерения угла наклона платформы
Проведем анализ действий оператора по выравниванию платформы
строительной машины [34]. На рис. 3.7 показана схема поэтапного выравнивания
платформы строительной машины при помощи рычагов управления (Р1, Р2,
Р3, Р4 – номера рычагов, соответствующие номерам опор, которые
обозначены цифрами 1, 2, 3, 4). Рассмотрен вариант,
при котором платформа имеет наклон и по оси X, и по оси Y (положение 1).
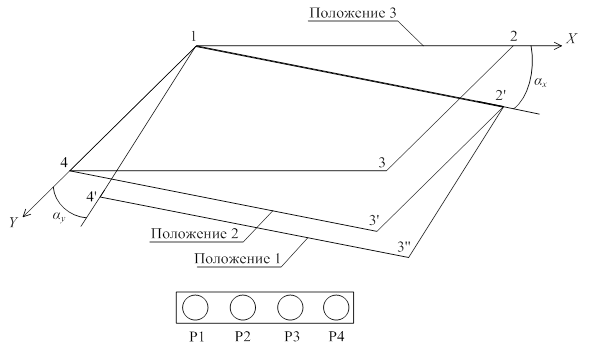
Рис. 3.7. Схема поэтапного
выравнивания платформы строительной машины при помощи рычагов управления
Так как оператор не имеет возможности управлять сразу тремя
опорами, он вынужден устранять крен сначала по оси Y (т.е. переводить платформу в положение 2,
путем подъема 3-й и 4-й опор, воздействуя на рычаги Р3 и Р4, а
затем по оси X, поднимая
2-ю и 3-ю опоры при помощи рычагов Р2 и Р3, пока платформа не
выровняется (положение 3) [34].
Рассмотрим также процесс выравнивания платформы строительной
машины системой автоматического управления [12, 13, 14, 33]. На рис. 3.8
схематично показаны два положения платформы: это рабочее горизонтальное
положение 2 и недопустимое положение 1, когда платформа имеет
наклон. В положении 1 платформа имеет угол наклона по двум направлениям X и Y, наклон соответствует углам αx и αy. Для устранения наклона необходимо
управление гидравлическими опорами 1, 2, 3, 4.
Оси X
и Y расположены по диагоналям платформы.
Датчики крена необходимо установить на платформе таким образом, чтобы оси вращения
датчиков были параллельны диагоналями платформы. Такое расположение позволяет
выравнивать платформу, управляя всеми четырьмя опорами, что положительно сказывается
на быстродействии системы [12, 13, 14, 33].
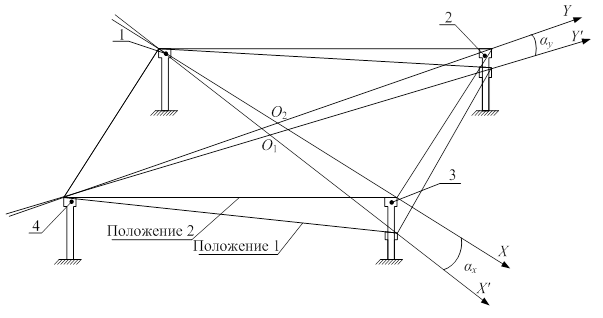
Рис. 3.8. Расположение осей измерения
угла наклона платформы строительной машины
Для устранения угла наклона по оси X необходимо поднимать опору 3
и опускать опору 1, а для устранения угла наклона по оси Y – необходимо поднимать опору 2
и опускать опору 4. Достичь наибольшего быстродействия позволяет
алгоритм управления сразу четырьмя опорами одновременно. При появлении наклона
платформы микропроцессорный контроллер обрабатывает информацию с датчиков угла
наклона и по заложенному алгоритму формирует сигналы управления каждой опорой.
Из всего вышеизложенного можно сделать вывод, что быстродействие
системы будут определять конструктивные особенности гидросистемы управления
опорами платформы строительной машины. Расположение осей измерения углов
наклона платформы параллельно ее диагоналям существенно облегчает составление
алгоритма работы системы. Но т.к. платформа строительной машины, а точнее,
точки касания опор платформы образуют прямоугольник, а не квадрат, то оси X и Y перестают быть перпендикулярными, угол между ними
становится менее 90°. Фактический угол зависит от конструкции опор и платформы [12,
13, 14, 33].
Для выполнения расчета примем одну из осей за неподвижную
(рис. 3.9, ось X), а ось Y будем смещать относительно оси X. При смещении оси, т.е. при
изменении угла между X
и Y, по оси X показания датчика угла наклона будут совпадать с
реальным углом наклона по этой оси, а по оси Y показания будут различаться с реальным углом наклона
платформы. Для исправления этих расхождений необходимо определить поправочный
коэффициент, на который нужно умножить угол наклона, полученный с датчика
наклона по оси X. Коэффициент
будет зависеть от угла между осями X и Y.
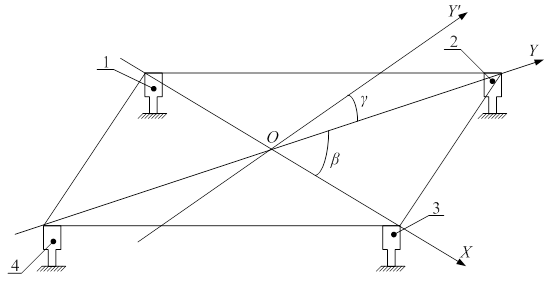
Рис. 3.9. Смещение осей
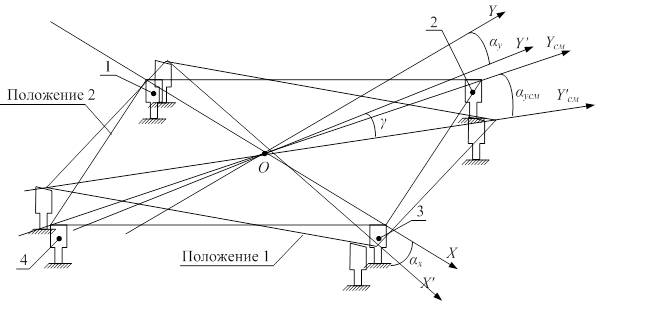
Рис. 3.10. Угол наклона по датчику
крена и фактический угол наклона
платформы строительной машины
На рис. 3.9
схематично показано, как смещаются оси координат. β – фактический
угол между диагональными осями X и Y; γ – угол смещения оси Y относительно оси Y'. На рис. 3.10 показано, как меняется реальный угол
наклона по оси Y. αy – фактический угол наклона платформы
по оси Y; αyсм – угол, который показывает датчик
наклона. Необходимо вывести зависимость между αyсм и αy, для этого построим расчетную схему
(рис. 3.11).
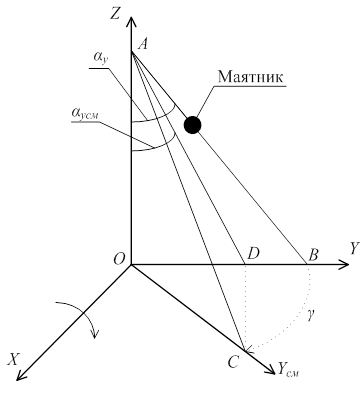
Рис. 3.11. Расчетная схема
Исходя из расчетной схемы (см. рис. 3.11) получаем следующие
зависимости:
 ; (3.13) ; (3.13)
 ; (3.14) ; (3.14)
 ; (3.15) ; (3.15)
 ; (3.16) ; (3.16)
 ; (3.17) ; (3.17)
 ; (3.18) ; (3.18)
 ; (3.19) ; (3.19)
 . (3.20) . (3.20)
С использованием программы Microsoft Excel получены зависимости угла αy от αyсм и γ. На основании этих
зависимостей построены графики, представленные на рис. 3.12, 3.13.
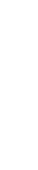 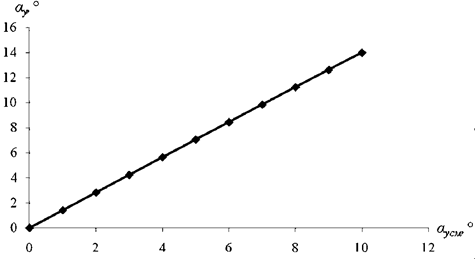
Рис. 3.12. График зависимости αy от αyсм при γ = 45°
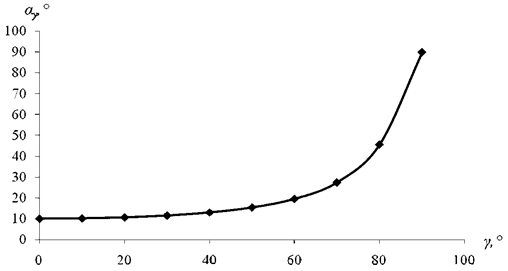
Рис. 3.13. График зависимости αy от γ при αyсм=10°
Рис. 3.14. Экспериментальный макет
платформы строительной машины
Для того чтобы подтвердить адекватность полученных зависимостей,
был проведен эксперимент.
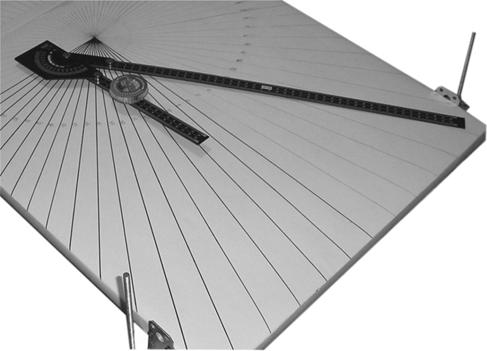
Рис. 3.15. Экспериментальный макет
платформы строительной машины и прибор для измерения угла наклона платформы
На рис. 3.14 представлен экспериментальный макет платформы
строительной машины. Макет имеет четыре точки опоры с поверхностью. Конструкция
опор позволяет регулировать угол наклона платформы в горизонтальной плоскости,
данная регулировка производится вращением штока.
Таблица 3.1. Значения измерения угла наклона
|
γ,°
|
αy1,°
|
αy2,°
|
αy3,°
|
αy.ср,°
|
αy.теор,°
|
Δαy.абс,°
|
|
0,0
|
12,0
|
12,5
|
12,0
|
12,2
|
11,9
|
0,3
|
|
5,0
|
12,0
|
12,0
|
11,8
|
11,7
|
11,8
|
0,1
|
|
10,0
|
11,5
|
11,5
|
11,7
|
11,6
|
11,7
|
0,0
|
|
15,0
|
11,0
|
11,0
|
11,5
|
11,2
|
11,5
|
0,3
|
|
20,0
|
10,5
|
11,0
|
11,5
|
11,0
|
11,2
|
0,2
|
|
25,0
|
10,5
|
10,5
|
11,7
|
10,9
|
10,8
|
0,1
|
|
30,0
|
10,0
|
10,0
|
10,0
|
10,0
|
10,3
|
0,3
|
|
35,0
|
9,5
|
9,5
|
9,8
|
9,6
|
9,8
|
0,2
|
|
40,0
|
9,0
|
9,0
|
8,5
|
8,8
|
9,1
|
0,3
|
|
45,0
|
8,0
|
8,5
|
8,5
|
8,3
|
8,4
|
0,1
|
|
50,0
|
7,0
|
7,5
|
7,0
|
7,2
|
7,7
|
0,5
|
Для измерения угла наклона платформы в горизонтальной плоскости
использовался строительный угломер с закрепленным на нем пузырьковым уровнем.
На рис. 3.15 показан макет платформы с прибором для измерения угла наклона
платформы.
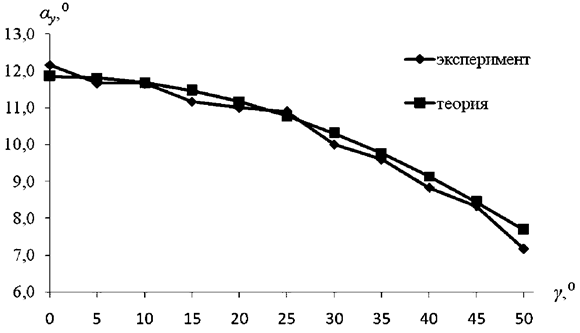
Рис. 3.16. График зависимости αy от γ
В ходе эксперимента были получены значения угла наклона
платформы, измеренные при разных углах установки датчика наклона. Все
измеренные значения были сведены в табл. 3.1.
Для того чтобы уменьшить случайную ошибку при измерении,
измерения для каждого значения измеряемого параметра повторялись 3 раза. Из рис.
3.16, где представлен график зависимости αy от γ, видно, что
теоретическая и практическая кривые совпадают, максимальное значение
расхождения теоретических и экспериментальных данных Δαy.абс составляет 0,5°(см. табл. 3.1). Практический
эксперимент подтвердил адекватность зависимости, полученной теоретически.
|
