3. РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
3.1. Обоснование критерия эффективности процесса управления положением платформы строительной машины
Для правильной и безопасной работы
строительной машины необходимо выдерживать платформу в горизонтальном
положении. Допустимые отклонения угла наклона платформы к горизонту определены
в требованиях безопасности при работе строительной машины [34, 35].
 (3.1) (3.1)
 (3.2) (3.2)
где αx и αy – фактические углы наклона платформы
к горизонту по осям X
и Y; αxдоп и αyдоп – максимально допустимые углы
наклона платформы к горизонту по осям X и Y.
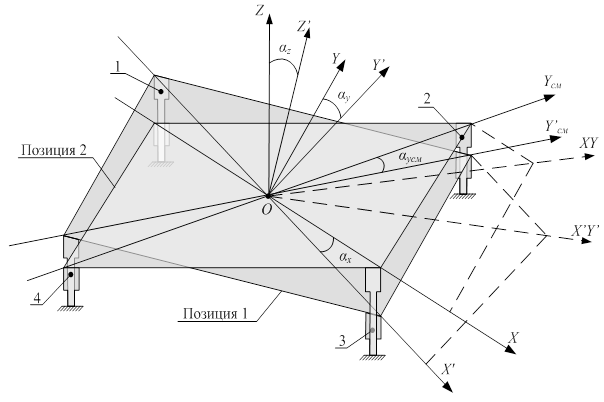
Рис. 3.1. Определение критерия
эффективности
На рис. 3.1 схематично показана платформа строительной машины,
которая имеет наклон по осям X
и Y. Векторная сумма углов наклона αx и αy будет образовывать результирующий
угол наклона αz (рис. 3.2). Согласно требованиям безопасности наклон
платформы в горизонтальной плоскости для большинства строительных машины должен
составлять αz ≤ 3° [34, 35].
Рассмотрим расчетную схему OB, представленную на рис. 3.2:
 ; (3.3) ; (3.3)
 ; (3.4) ; (3.4)
 ; (3.5) ; (3.5)
 (3.6) (3.6)
 . (3.7) . (3.7)
Подставим в формулу (3.6) формулы (3.4), (3.5) и (3.7):
 ; (3.8) ; (3.8)
 . (3.9) . (3.9)
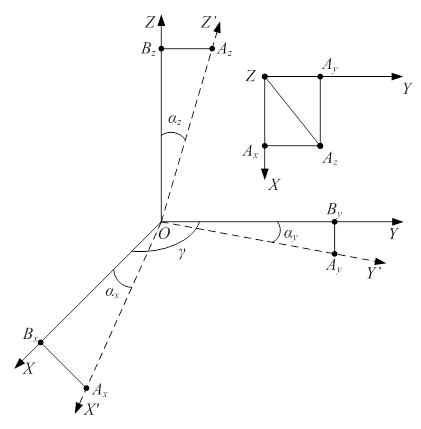
Рис. 3.2. Расчетная схема для
нахождения αz
Основным требованием к устройству управления платформой
строительной машины является точность и быстродействие устройства управления. Таким
образом, в качестве критерия эффективности было принято быстродействие
устройства управления при обеспечении заданной точности:
tпп → min (3.10)
при
Dαz ≤ Dαzзад. (3.11)
Также необходимо учитывать ограничения, налагаемые на систему
управления:
1. Сила нормальной реакции на i-й опоре Ri ≥ Rmin:
Ri = pпi Sпi – pшi (Sпi – Sшi), (3.12)
где pпi и pшi – давление в поршневой и штоковой
полостях гидроцилиндра i-й
опоры; Sпi, Sшi – площади поршневой и штоковой полостей
гидроцилиндра i-й опоры; Rmin – минимальное предельное значение силы реакции на любой
из опор (порядка 10 % от расчетной доли веса платформы, приходящейся на один
гидроцилиндр) [17].
2. Длина i-й опоры Lmin
пред ≤ Li ≤ Lmax пред.
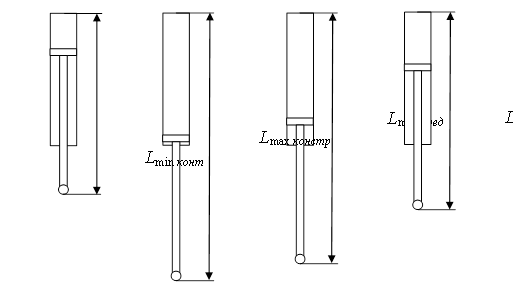
Рис. 3.3. Длины гидравлических опор
На рис. 3.3 схематично показаны положения штока гидроцилиндра
опоры: Lmin конт – минимальная длина отдельной гидравлической опоры,
при которой обеспечивается условие отсутствия касания грунта пневматическими
ходовыми элементами машины; Lmax констр –
максимальная длина отдельной гидравлической опоры, при которой шток выдвинут на
максимально допустимую конструкцией гидроцилиндра длину; Lmin пред – минимальная предельно допустимая длина отдельной
опоры в рабочем режиме машины; Lmax пред – максимальная предельно допустимая длина отдельной
опоры в рабочем режиме машины [23, 24, 25].
|
