3. РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
3.7. Структура математической модели процесса управления положением платформы строительной машины с применением ЭВМ
В качестве инструмента для реализации разработанного математического
аппарата был выбран программный комплекс MATLAB R2009а и его пакетное приложение
Simulink, дающее возможность визуально-блочного программирования и всестороннего
исследования полученной модели [4, 27].
На рис. 3.36 представлена модель системы управления положением
платформы, выполненная в виде последовательно соединенных подсистем с
множеством входных и выходных параметров. Составленное математическое описание
системы управления положением платформы позволяет учитывать множество
конструктивных особенностей машины при изучении процесса управления платформой.
Для того, чтобы определить, как работает данная модель, была
смоделирована ситуация, когда платформа имеет наклон αx = 3° (по оси X) и αy = 2° (по оси Y). На рис. 3.37 схематично показана
платформа, имеющая наклон по двум осям: X и Y.
На рис. 3.38 представлен график переходного процесса работы
системы. На графике показана зависимость изменения угла наклона платформы αz от времени. На рис. 3.39
представлен график переходного процесса работы всей системы. На графике
показаны зависимости положений штоков гидроцилиндров опор от времени.
Составленные расчетные схемы и аналитические зависимости
позволили разработать сложную математическую модель процесса управления и
исследовать ее характеристики. Разработанная математическая модель процесса
управления положением платформы строительной машины позволяет проводить
теоретические исследования и легко реализуется на ПЭВМ с помощью программного
комплекса MATLAB и его приложения Simulink.

Рис. 3.36. Модель системы управления
положением платформы, выполненная в обозначениях Simulink
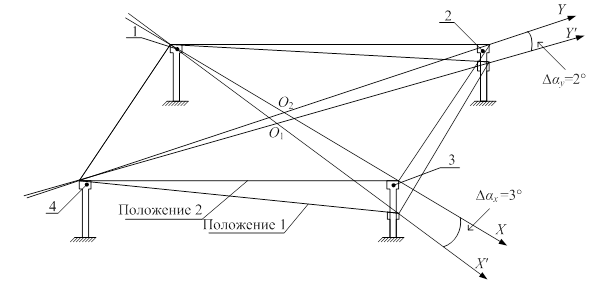
Рис. 3.37. Платформа, имеющая наклон
по двум осям: X и Y
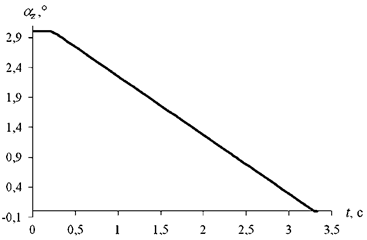
Рис. 3.38. График зависимости αz от времени
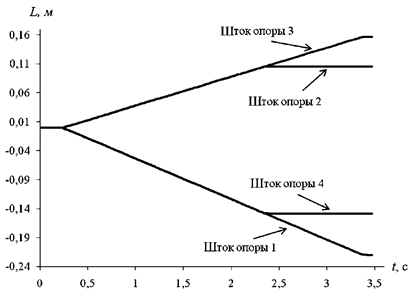
Рис. 3.39. График зависимости L1, L2, L3, L4 от времени
Предложенный алгоритм работы устройства управления позволяет
выполнять выравнивание платформы строительной машины максимально быстро и
просто.
|
