3. РАЗРАБОТКА МАТЕМАТИЧЕСКОЙ МОДЕЛИ УСТРОЙСТВА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ПЛАТФОРМЫ СТРОИТЕЛЬНОЙ МАШИНЫ
3.6. Математическая модель процесса управления положением платформы строительной машины
3.6.1. Математическая модель платформы
Платформа представляет собой жесткую металлоконструкцию,
которая также жестко соединена с гидравлическими аутригерами. При описании
математической модели платформы строительной машины были приняты следующие допущения:
1) конструкция платформы не деформируется и не меняет
своих геометрических размеров в процессе работы строительной машины;
2) соединение аутригера с платформой не имеет люфтов.
На рис. 3.21 приведена расчетная схема для определения изменения
угла наклона платформы к горизонту в зависимости от длин аутригеров. AB – расстояние между диагональными
аутригерами платформы; AD
и BC – длины диагональных аутригеров.
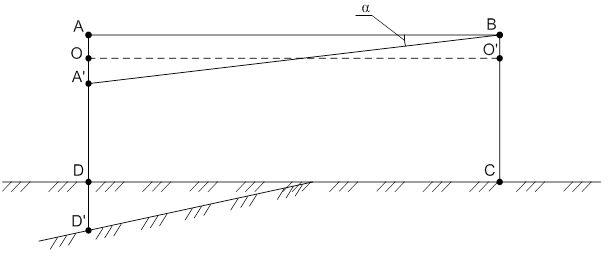
Рис. 3.21. Расчетная схема для
определения положения платформы
строительной машины
Моделируется ситуация провала опоры AD. Опора принимает положение A'D', а диагональ платформы – положение A'B. Отрезок AB находится в горизонтальном положении, затем платформа получает крен, отрезок
AB наклоняется к горизонту на угол α
и занимает положение A'B.
Для устранения угла наклона α необходимо
компенсировать провал опоры, для этого необходимо определить величину провала DD':
 . (3.24) . (3.24)
Из формулы (3.24) может быть получено значение угла α:
 . (3.25) . (3.25)
|
